

Week 7 Update
Hello everyone!, This is one of the AZTECH’s programming leads Logan!. This week mechanical finished the robot and we’ve finally gotten to start testing code for the robot!
Drivetrain: This year we’ve opted to use a different gyro called the Pigeon 2.0, allowing us to generate the code for our drivetrain from the manufacturer. Learning how to do this will make this process faster in the future. The first several attempts ended with one of the wheels being a few degrees off, but that discrepancy wasn't constant and as the wheel kept turning, would change. The solution we came across for that was as a part of the CANcoder which reads the angle of each wheel, The magnet which attaches to the rotating shaft, was not secured and would sometimes wiggle in place making the reading inaccurate. After that was fixed, the drivetrain actually worked, though we weren’t able to drive it around till we got a bellypan so instead we started to test subsystems.
Intake: We started with the intake first, following the route the fuel (the yellow balls) would be taking on our robot, because we couldn’t drive around, we opted to load by hand while running the intake wheels, this test was successful overall with the intake wheels grabbing onto the fuel and quickly pulling it into the hopper.
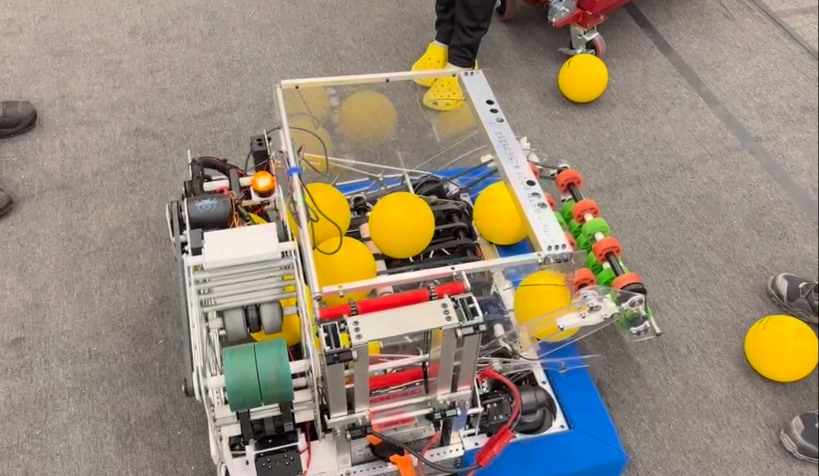
.Hopper: Next we moved to the hopper which is where the fuel will be stored between intaking and scoring, beyond storage there is a set of belts built into the floor of the hopper which aggregate the fuel during intaking and drive them towards a hole into the indexer. For the first test we just loaded from the top to test the aggregation, from this test we discovered a few recurring issues we will continue to encounter later including fuel rolling in place (like a treadmill) and the belts falling off the sprockets, While the belts still fall off, we opted to place a smaller set of belts in between the older ones making it more difficult for fuel to get stuck in place
Indexer: Now we’re on the indexer which is a small magazine like tunnel which feeds fuel into the shooter for scoring, we started with a full hopper running the belts into the indexer which is also running, This worked well with the indexer even ejecting fuel in the way at the top when the shooter wasn’t running. Now that everything else works, we had mechanical install the bellypan so we can move onto moving tests.
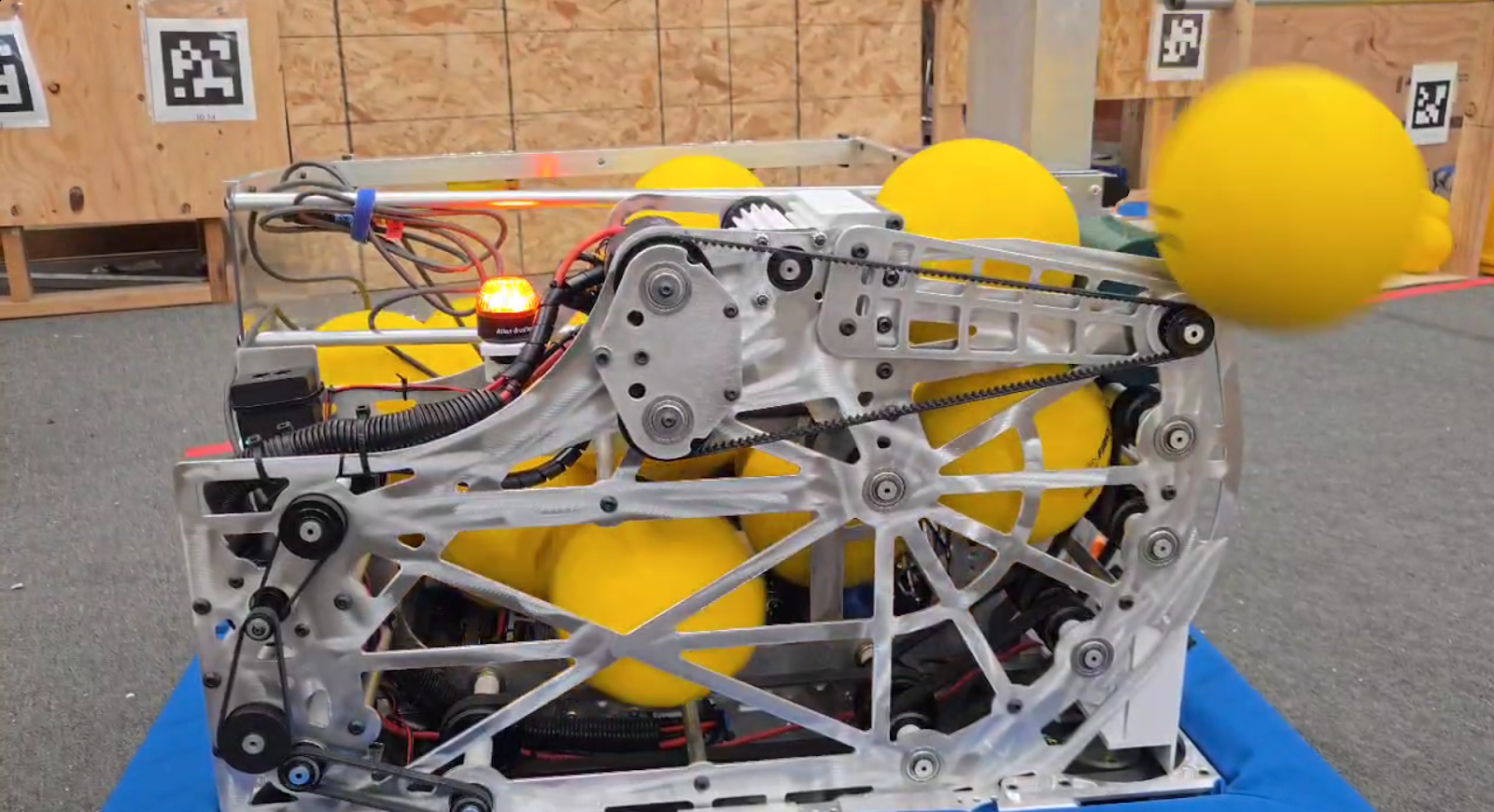
Shooter: Now were to the most interesting part, the shooter which is responsible for scoring the fuel given to it from the indexer, and is driven by 2 motors attached to 1 belt driving a set of wheels, we tested by dropping fuel in through the top into the running hopper and indexer which fed the fuel into the shooter.
Future Progress: Now that all of our driving subsystems are working, we will move onto the more complicated ones like the climb, stowing the intake, and adjusting the shooter hood as we move closer to our first competition.
